这里将要研究的是 2 维以及 3 维 Euclid 空间 `E^2` 与 `E^3`, 通过向量的概念及其性质, 以及高等代数中关于向量空间的结论, 首先建立几何空间的仿射坐标系, 刻画其线性结构 (基, 线性相关, 线性无关); 既而, 运用向量的内积与外积, 刻画其度量结构 (角度, 距离, 面积, 体积).
既有大小, 又有方向的量称为向量或矢量, 用符号 `bm a, bm b, bm c, cdots` 或 `vec a, vec b, vec c` 表示.
向量 `bm a` 可以用一条有向线段 `vec(AB)` 表示, 用其长度 `|AB|` 表示向量的大小, 用 `A` 到 `B` 的指向表示向量的方向, 记为 `vec(AB) = bm a`. 不过向量不等同于有向线段, 它仅仅是 "大小" 与 "方向" 两个概念的集合, 即, 如果两个向量的大小与方向都相等, 则它们是同一向量. 因此, 若把 `vec(AB)` 平行移动, 得到的有向线段 `vec(CD)` 仍表示同一向量. 记 `vec(AB) = vec(CD)`.
向量 `bm a` 的大小又称为长度或模, 记为 `|bm a|`. 称长度为 0 的向量为零向量, 记为 `bb 0`. 零向量的方向不确定: 我们规定它与任意向量都是同向的. 称长度为 1 的向量为单位向量. 称长度与 `bm a` 相等, 方向与 `bm a` 相反的向量为 `bm a` 的反向量, 记为 `-bm a`. 例如, `vec(BA) = -vec(AB)`.
我们考虑的向量总是属于某一集合的. 比如, 属于 2 维或 3 维 Euclid 空间 (`E^2` 或 `E^3`). 这一集合称为向量空间. 下面将引出向量的两种线性运算——加法与数乘, 联系高等代数的知识可以知道, 向量空间是典型的线性空间.
三角形法则 设有向量 `bm a, bm b`, 选择一起点 `A`, 作有向线段 `vec(AB) = bm a`, `vec(BC) = bm b`, 则称 `vec(AC)` 表示的向量为 `bm a` 与 `bm b` 的和, 即 `vec(AB) + vec(BC) = vec(AC)`.
若另取一个起点 `A_1`, 作 `vec(A_1 B_1) = bm a`, `vec(B_1 C_1) = bm b`, 容易说明 `vec(A_1 C_1)` 与 `vec(AC)` 表示同一个向量. 因此向量的加法与起点选择无关.
也可以选取起点 `O`, 作 `vec(OA) = bm a`, `vec(OB) = bm b`, 再以 `OA` 和 `OB` 为邻边作平行四边形 `OACB`. 容易说明对角线 `vec(OC) = bm a + bm b`. 这称为向量加法的平行四边形法则.
向量 `bm a, bm b` 的减法定义为 `bm a - bm b = bm a + (-bm b)`.
三角不等式 对任意向量 `bm a, bm b`, ` | |bm a| - |bm b| | le |bm a + bm b| le |bm a| + |bm b|`.
实数 `lambda` 与向量 `bm a` 的数乘运算结果为一向量, 它的大小定义为 `|lambda bm a| = |lambda| |bm a|`, 当 `lambda gt 0` 时, 定义 `lambda bm a` 的方向与 `bm a` 相同, `lambda lt 0` 时则与 `bm a` 相反.
对任意向量 `bm a`, `|0 bm a| = bb 0`; 对任意实数 `lambda`, `lambda bb 0 = bb 0`.
设向量 `bm a != bb 0`, 则向量 `(bm a)/|bm a|` 与 `bm a` 同向, 且长度为 1. 称这一计算过程为 `bm a` 的单位化.
设 `bm a_1, cdots, bm a_n` 是一组向量, `k_1, cdots, k_n` 是一组实数, 则 `k_1 bm a_1 + cdots + k_n bm a_n` 是一个向量, 称为向量组 `bm a_1, cdots, bm a_n` 的一个线性组合. 称向量组 `bm a_1, cdots, bm a_n` 线性相关, 如果存在不全为零的系数 `k_1, cdots, k_n`, 使得 `sum_(i=1)^n k_i bm a_i = bb 0`. 否则称该向量组线性无关.
用同一起点的有向线段表示向量组中的每个向量. 若这些有向线段在同一直线 (同一平面) 上, 则称这个向量组是共线的 (共面的). 向量共线也称为平行, 记为 `bm a //// bm b`.
`bb 0` 与任意向量共线; 共线的向量组必共面; 两个向量一定共面.
向量 `bm a, bm b` 共线当且仅当 `bm a, bm b` 线性相关.
向量 `bm a, bm b, bm c` 共面当且仅当 `bm a, bm b, bm c` 线性相关.
向量的线性运算可以用来解决点的共线或共面问题, 直线的共点问题以及线段的定比分割问题.
设点 `O` 是任意一点. 证明: 点 `M` 在线段 `AB` 上当且仅当存在非负实数 `lambda, mu` 满足 `vec(OM) = lambda vec(OA) + mu vec(OB)`, 且 `lambda + mu = 1`. 这时也称 `vec(OM)` 是 `vec(OA)` 与 `vec(OB)` 的凸组合.
设点 `O` 是任意一点. 证明: 点 `A, B, C` 共线当且仅当存在不全为零为实数 `lambda, mu, nu`, 使得 `lambda vec(OA) + mu vec(OB) + nu vec(OC) = bb 0`, 且 `lambda + mu + nu = 0`.
几何空间 `V` 是空间中所有点的集合. 取定一点 `O`, 则几何 空间中的任一点 `M` 对应于向量 `vec(OM)`. 事实上, 对平移后能够重合的向量不加区分, 则几何空间 `V` 中的点与向量空间 `E^3` 中的向量是一一对应的.
称 `E^3` 中任意三个线性无关向量 `{bm d_1, bm d_2, bm d_3}` 为 `E^3` 的一个基. 对任意 `bm x in E^3`, 若 `bm x` 能表示为基的线性组合, 即 `EE x_i in RR`, `i = 1, 2, 3`, `bm x = sum_(i=1)^3 x_i bm d_i`. 则称三元有序实数组 `(x_1, x_2, x_3)` 为 `bm x` 在基 `{bm d_1, bm d_2, bm d_3}` 下的仿射坐标, 简称坐标. 在仿射坐标给定 (或隐含给定) 的情况下, 简记为 `bm x = (x_1, x_2, x_3)`.
仿射坐标的存在唯一性 取定 `E^3` 的一个基, 则 `E^3` 中的任意向量在这个基下的的仿射坐标存在唯一.
考虑到向量与点的一一对应关系, 我们有:
`V` 中的一个点 `O` 与一个基 `{bm d_1, bm d_2, bm d_3}` 合在一起称为 `V` 的一个仿射标架或仿射坐标系, 记为 `{O";" bm d_1, bm d_2, bm d_3}`. 其中 `O` 称为原点. 把过原点 `O`, 且分别以 `bm d_1, bm d_2, bm d_3` 为方向的有向直线称为 `x` 轴, `y` 轴, `z` 轴, 统称为坐标轴. 每两根坐标轴决定的平面称为坐标平面, 即 `xy`, `yz`, `zx` 平面. 坐标平面把空间分为八个部分, 称为八个卦限, 在每个卦限内, 点的坐标的符号不变. 将右手拇指以外的四指从 `x` 轴方向弯向 `y` 轴方向, 且转角小于 `pi` 时, 如果拇指所指的方向与 `z` 轴方向在 `xy` 平面同侧, 则称此坐标系为右手系, 否则称为左手系.
设 `X in V`, 定义点 `X` 的仿射坐标为它的定位向量 `vec(OX)` 在基 `{bm d_1, bm d_2, bm d_3}` 下的仿射坐标 `(x_1, x_2, x_3)`. 在仿射坐标给定 (或隐含给定) 的情况下, 简记为 `X(x_1, x_2, x_3)`.
如果 `bm e_1, bm e_2, bm e_3` 两两垂直, 且都是单位向量, 则称 `{O";" bm e_1, bm e_2, bm e_3}` 为一个正交标架或直角标架, 或直角坐标系. 显然 `bm e_1, bm e_2, bm e_3` 不共面, 因此直角标架是特殊的仿射标架.
平面上的仿射坐标系与直角坐标系也可以类似地建立起来.
向量的坐标等于其终点坐标减去其起点坐标.
考虑向量 `vec(BA)`, 设 `A, B` 的坐标分别是 `(a_1, a_2, a_3)`, `(b_1, b_2, b_3)`, 它们也分别是 `vec(OA)`, `vec(OB)` 的坐标. 所以 `vec(BA) = vec(OA) - vec(OB)` 的坐标是 `(a_1 - b_1, a_2 - b_2, a_3 - b_3)`.
设 `bb 0 != bm d in E^3`, 则 `bm a in E^3` 沿 `bm d` 的分量为 `Pi_(bm d)(bm a) = |bm a| cos (:bm a, bm d:)`, `(:bm a, bm d:)` 是向量 `bm a` 与 `bm d` 之间的夹角.
内射影是从空间到轴上的线性变换, 分量是从空间到 `RR` 的线性映射. 设 `bm a, bm b in E^3`, `lambda in RR`, 则 `cc P_(bm d)(bm a + bm b) = cc P_(bm d)(bm a) + cc P_(bm d)(bm b)`, `quad cc P_(bm d)(lambda bm a) = lambda cc P_(bm d)(bm a)`. `Pi_(bm d)(bm a + bm b) = Pi_(bm d)(bm a) + Pi_(bm d)(bm b)`, `quad Pi_(bm d)(lambda bm a) = lambda Pi_(bm d)(bm a)`.
内积定义为一个映射 `(*): V xx V to RR`: `bm a * bm b = |bm a| |bm b| cos (:bm a, bm b:)`. `bm a` 和 `bm b` 中有一个为 `bb 0` 时, 规定 `bm a * bm b = 0`.
的 1 揭示了内积与分量的联系; 由 2 和 3 可见, 内积与空间中的长度和角度有关.
在一般的 Euclid 空间或内积空间中, 往往先以定义内积, 再由 `|bm a| = sqrt(bm a * bm a)` 定义范数. 见高等代数和泛函分析.
取定仿射标架 `{O";" bm d_1, bm d_2, bm d_3}`, `bm a = (a_1, a_2, a_3)`, `bm b = (b_1, b_2, b_3)`, 则 ` bm a * bm b = (sum_(i=1)^3 a_i bm d_i) * (sum_(j=1)^3 b_j bm d_j) = sum_(i=1)^3 sum_(j=1)^3 a_i b_j bm d_i * bm d_j`. 因此只要知道 `bm d_1, bm d_2, bm d_3` 之间的内积 (9 个数, 由对称性, 实质上只有 6 个数), 就可以求出任意两个向量的内积. 这 9 个数称为仿射标架 `{O";" bm d_1, bm d_2, bm d_3}` 的度量参数.
特别当所取的仿射标架为正交标架 `{O";" bm e_1, bm e_2, bm e_3}` 时, `bm e_i * bm e_j = delta_(ij)`, `i, j = 1, 2, 3`. 其中 `delta_(ij) = { 1, if i = j; 0, if i != j :}` 称为Kroneker 符号. 因此在正交标架下, `bm a * bm b = sum_(i=1)^3 a_i b_i`. 联系, 在正交标架下, 向量 `bm a = (a_1, a_2, a_3)` 的长度为 `|bm a| = sqrt(sum_(i=1)^3 a_i^2)`, 空间中两点 `X(x_1, x_2, x_3)`, `Y(y_1, y_2, y_3)` 的距离为 `|vec(XY)| = sqrt(sum_(i=1)^3 (x_i - y_i)^2)`.
取正交标架 `{O";" bm e_1, bm e_2, bm e_3}`, 任取向量 `bm a = sum_(j=1)^3 a_j bm e_j`, 两边与 `bm e_i` 作内积得 ` bm a * bm e_i = sum_(j=1)^3 a_j bm e_i * bm e_j = sum_(j=1)^3 a_j delta_(ij) = a_i`, `i = 1, 2, 3`. 说明在正交标架下, `bm a` 与基向量 `bm e_i` 的内积就是 `bm a` 的第 `i` 个坐标. 特别, 当 `bm a` 为单位向量时, 又有 ` a_i = bm a * bm e_i = cos (:bm a, bm e_i:)`. 角 `(:bm a, bm e_i:)`, `i = 1, 2, 3`, 称为方向 `bm a` 方向角, 其余弦值称为方向 `bm a` 的方向余弦. 由 `|bm a| = 1` 知 `sum_(i=1)^3 cos^2 (:bm a, bm e_i:) = 1`. 所以方向余弦的平方和恒等于 1.
外积定义为映射 `(xx): V xx V to V`: `|bm a xx bm b| = |bm a| |bm b| sin (:bm a, bm b:)`, 当 `|bm a xx bm b| != 0` 时, 它的方向服从右手定则, 即当右手四指从 `bm a` 以小于 `pi` 的转角弯向 `bm b` 时, 拇指就指向 `bm a xx bm b`: `bm a xx bm b _|_ bm a`, `quad` `bm a xx bm b _|_ bm b`, `quad` `(bm a, bm b, bm a xx bm b)` 成右手系. `bm a` 和 `bm b` 中有一个为 `bb 0` 时, 规定 `bm a xx bm b = bb 0`.
一般的空间中, 可以将满足的映射定义为外积. 如微分几何中的外微分就满足上述外积的性质.
取定仿射标架 `{O";" bm d_1, bm d_2, bm d_3}`, `bm a = (a_1, a_2, a_3)`, `bm b = (b_1, b_2, b_3)`, 则 ` bm a xx bm b = (sum_(i=1)^3 a_i bm d_i) xx (sum_(j=1)^3 b_j bm d_j)` `= (a_2 b_3 - a_3 b_2) bm d_2 xx bm d_3 + (a_3 b_1 - a_1 b_3) bm d_3 xx bm d_1 + (a_1 b_2 - a_2 b_1) bm d_1 xx bm d_2` `= |bm d_2 xx bm d_3, bm d_3 xx bm d_1, bm d_1 xx bm d_2; a_1, a_2, a_3; b_1, b_2, b_3|`. 因此只要知道 `bm d_1, bm d_2, bm d_3` 之间的外积, 就可以求出任意两个向量的外积.
设 `bm e` 是单位向量, `bm b _|_ bm e`, 则 `bm e xx bm b` 等于 `bm b` 在以 `bm e` 为法向量的平面上按右手法则旋转一个直角得到的向量.
现在取右手正交标架 `{O";" bm e_1, bm e_2, bm e_3}`, 由 有 `bm e_1 xx bm e_2 = bm e_3`, `quad` `bm e_2 xx bm e_3 = bm e_1`, `quad` `bm e_3 xx bm e_1 = bm e_2`. 于是 ` bm a xx bm b = |bm e_1, bm e_2, bm e_3; a_1, a_2, a_3; b_1, b_2, b_3|`, ` |bm a xx bm b| = sqrt( |a_2, a_3; b_2,b_3|^2 + |a_3, a_1; b_3,b_1|^2 + |a_1, a_2; b_1,b_2|^2 )`.
曲面的一个法向量称为它的一个定向. 规定当右手拇指指向所给定的法向量时, 右手四指的环绕方向就是曲面上的绕行方向. 这个绕行方向也称为曲面的定向.
设 `bm n` 是平面 `pi` 的一个单位法向量, `bm a, bm b in pi`. 由外积定义, `bm n //// bm a xx bm b`, 由于 `bm n != bb 0`, 存在唯一的 `lambda in RR` 使得 `bm a xx bm b = lambda bm n`. 称 `lambda` 为 `bm a` 与 `bm b` 关于定向 `bm n` 的平面向量混合积, 记为 `(bm a, bm b)`. 由定义, `bm a xx bm b = (bm a, bm b) bm n`. `bm a, bm b` 不共线时, 以 `bm a, bm b` 为邻边的平行四边形的定向面积或有向面积是指, 当 `bm a, bm b, bm n` 成右手系时, 定向面积等于面积; 否则定向面积等于面积的相反数. 这个定向面积恰好等于 `(bm a xx bm b)`.
在平面上取定仿射标架 `{O";" bm d_1, bm d_2}`, 令 `bm d_3 = bm d_1 xx bm d_2` 为平面的定向, 则 `{O";" bm d_1, bm d_2, bm d_3}` 是空间中的仿射标架, 且为右手系. 设 `bm a = a_1 bm d_1 + a_2 bm d_2`, `bm b = b_1 bm d_1 + b_2 bm d_2`, 因为 ` bm a xx bm b = |bm d_2 xx bm d_3, bm d_3 xx bm d_1, bm d_1 xx bm d_2; a_1, a_2, 0; b_1, b_2, 0|` `= |a_1, a_2; b_1, b_2| bm d_3`, 所以 ` (bm a, bm b) = |a_1, a_2; b_1, b_2| |bm d_3|`.
特别取右手正交标架 `{O";" bm e_1, bm e_2}` 时, `(bm a, bm b) = |a_1, a_2; b_1, b_2|`.
平面上两向量 `bm a = (a_1, a_2)`, `bm b = (b_1, b_2)` 共线当且仅当它们所围的平行四边形的定向面积 `|a_1, a_2; b_1, b_2| = 0`.
平面上三点 `A(a_1, a_2)`, `B(b_1, b_2)`, `C(c_1, c_2)` 共线当且仅当它们所围的三角形的定向面积 `1/2 |a_1, a_2, 1; b_1, b_2, 1; c_1, c_2, 1| = 0`.
二重外积公式 设 `bm a, bm b, bm c in E^3`, 则 ` bm a xx (bm b xx bm c) = (bm a * bm c) bm b - (bm a * bm b) bm c` `= |bm b, bm c; bm a * bm b, bm a*bm c|`.
Jacobi 等式 `sum bm a xx (bm b xx bm c) = bb 0`. 上式遵循轮换求和约定, 相当于 `bm a xx (bm b xx bm c) + bm b xx (bm c xx bm a) + bm c xx (bm a xx bm b) = bb 0`.
混合积定义为映射 `(*,*,*): V^3 to RR`: `(bm a, bm b, bm c) = bm a xx bm b * bm c`. 为使上式有意义, 应当先作外积, 再作内积.
给定空间中不共面的三向量 `bm a, bm b, bm c`, 由它们确定的平行六面体的定向体积或有向体积是指, 当 `bm a, bm b, bm c` 成右手系时, 定向体积等于体积; 否则定向体积等于体积的相反数. 由向量混合积的定义, 这定向体积恰好等于 `(bm a, bm b, bm c)`.
三向量 `bm a, bm b, bm c` 共面当且仅当 `(bm a, bm b, bm c) = 0`.
`bm a, bm b, bm c` 共面 `iff bm a xx bm c` 与 `bm a xx bm b` 共线 `iff (bm a xx bm b) xx (bm a xx bm c) = bb 0` `iff (bm a xx bm b * bm c) bm a - (bm a xx bm b * bm a) bm c = bb 0` `iff bm a xx bm b * bm c = 0`.
混合积具有轮换对称性. `(bm a, bm b, bm c) = (bm b, bm c, bm a) = (bm c, bm a, bm b)`. 由上式得 `bm a xx bm b * bm c = bm b xx bm c * bm a = bm a * bm b xx bm c`. 因此, 将混合积定义为 `bm a * bm b xx bm c` 也是一样的. 进一步可证, 交换混合积中任意两项, 结果相差一个负号.
取定仿射标架 `{O";" bm d_1, bm d_2, bm d_3}`, `bm a = (a_1, a_2, a_3)`, `bm b = (b_1, b_2, b_3)`, `bm c = (c_1, c_2, c_3)`, 则 ` (bm a, bm b, bm c) = bm a * bm b xx bm c` `= |bm d_2 xx bm d_3, bm d_3 xx bm d_1, bm d_1 xx bm d_2; b_1, b_2, b_3; c_1, c_2, c_3| * sum_(i=1)^3 a_i bm d_i` `= |a_1, a_2, a_3; b_1, b_2, b_3; c_1, c_2, c_3| (bm d_1, bm d_2, bm d_3)`.
特别, 当取定的标架为右手正交标架 `{O";" bm e_1, bm e_2, bm e_3}` 时, `(bm e_1, bm e_2, bm e_3) = 1`. 所以 `(bm a, bm b, bm c)` `= |a_1, a_2, a_3; b_1, b_2, b_3; c_1, c_2, c_3|`.
空间中三向量 `bm a = (a_1, a_2, a_3)`, `bm b = (b_1, b_2, b_3)`, `bm c = (c_1, c_2, c_3)` 共面当且仅当它们所围的平行六面体的定向体积 `|a_1, a_2, a_3; b_1, b_2, b_3; c_1, c_2, c_3| = 0`.
空间中四点 `A(a_1, a_2, a_3)`, `B(b_1, b_2, b_3)`, `C(c_1, c_2, c_3)`, `D(d_1, d_2, d_3)` 共面当且仅当它们所围的四面体的定向体积 `1/6 |a_1, a_2, a_3, 1; b_1, b_2, b_3, 1; c_1, c_2, c_3, 1; d_1, d_2, d_3, 1| = 0`.
Lagrange 恒等式 设 `bm a_1, bm a_2, bm b_1, bm b_2 in E^3`, 则 ` (bm a_1 xx bm a_2) * (bm b_1 xx bm b_2) = |bm a_1 * bm b_1, bm a_1 * bm b_2; bm a_2 * bm b_1, bm a_2 * bm b_2| = "det"(bm a_i * bm b_j)_(2 xx 2)`.
利用混合积的轮换对称性与二重外积公式, 左边 = `bm a_2 xx (bm b_1 xx bm b_2) * bm a_1 = |bm b_1, bm b_2; bm a_2 * bm b_1, bm a_2 * bm b_2| * bm a_1` = 右边.
(二维勾股定理) 直角三棱锥的斜面面积的平方等于其他三个直角面面积的平方和.
设 `OABC` 是直角三棱锥, `O` 为直角顶点, 于是 `angle AOB, angle BOC, angle COA` 是直角, `triangle ABC` 是它的斜面. 分别记 `vec(OA), vec(OB), vec(OC)` 为 `bm a, bm b, bm c`, 则 `bm a * bm b = bm b * bm c = bm c * bm a = 0`. 由的 1 有 `{: |vec(AB) xx vec(AC)|^2 ,= |vec(AB)|^2 |vec(AC)|^2 - (vec(AB)*vec(AC))^2; ,= (|bm a|^2 + |bm b|^2) (|bm a|^2 + |bm c|^2) - ((bm b - bm a) * (bm c - bm a))^2; ,= (|bm a|^2 + |bm b|^2) (|bm a|^2 + |bm c|^2) - |bm a|^4; ,= |bm a|^2 |bm b|^2 + |bm b|^2 |bm c|^2 + |bm c|^2 |bm a|^2. :}` 即得证.
Hamilton 四元数形如 `q = w + x i + y j + z k`, 其中 `w, x, y, z in RR`, `i^2 = j^2 = k^2 = i j k = -1`. 四元数之间的乘法由上式及分配律完全定义, 该乘法不满足交换律, 且每个非零的四元数都有乘法逆元, 即, 四元数关于该乘法构成一个除环.
`k^2 = -1` 两边同时右乘 `k^-1` 得 `k = -k^-1`, 即 `k^-1 = -k`. 同理 `i^-1 = -i`, `quad j^-1 = -j`, `quad k^-1 = -k`. 我们来说明 `i, j, k` 之间的乘法不可交换: `i j k = -1` 两边同时右乘 `k` 得 `-i j = - k`, 即 `i j = k`; 继续两边同时右乘 `j` 得 `-i = k j`. 类似也可以施以左乘, 最终得到 `i j = k = - j i`, `quad j k = i = - k j`, `quad k i = j = - i k`.
四元数的三角形式 一个四元数可以看作标量部分 `w` 与矢量部分 `bm v = x i + y j + z k` 之和. `bm v` 是基底 `i, j, k` 张成的三维线性空间中的向量. 四元数的长度 (模) 定义为 `|q| = sqrt(w^2+x^2+y^2+z^2)` `= sqrt(w^2 + v^2) quad`, 其中 `v = |bm v|`. 于是, 四元数可以写为模长与单位 (长度的) 四元数的乘积 `q = |q| hat q`, 单位四元数有三角表示 `hat q = cos theta + hat bm v sin theta`, `quad hat bm v` 为单位向量. 因为实数与四元数的乘法可交换, 两个四元数相乘, 可以把它们的模长与单位四元数分别相乘: `q_1 q_2 = |q_1| |q_2| hat q_1 hat q_2`.
2, 3, 4. 是 1. 的直接推论. 下证 1. 设 `bm v_lambda = x_lambda i + y_lambda j + z_lambda k`, `lambda = 1, 2`, 则左边等于 `(x_1, y_1, z_1) [i;j;k] (i, j, k) [x_2;y_2;z_2]` `= (x_1, y_1, z_1) [-1, k, -j; -k, -1, i; j, -i, -1] [x_2;y_2;z_2]` `= -(x_1 x_2 + y_1 y_2 + z_1 z_2) + (y_1 z_2 - z_2 y_1) i` `+ (z_1 x_2 - x_2 z_1) j + (x_1 y_2 - x_2 y_1) k`, 等于右边.
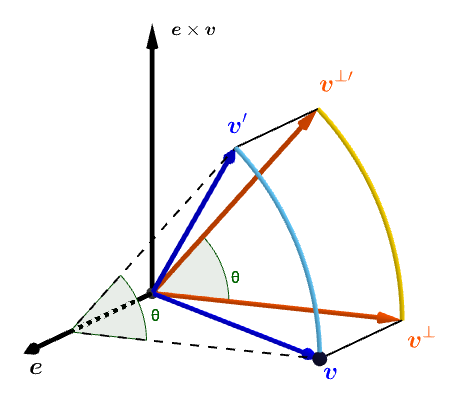
向量表示的证明. 设 `bm e` 与 `bm v` 不共线, 由二重外积公式, 将 `bm v` 分解到平行 `bm e` 和垂直 `bm e` 的方向上: `bm v = bm v^|| + bm v^(_|_)` `= (bm v * bm e) bm e + (bm e xx bm v) xx bm e`. 如图, `bm e, bm v^(_|_), bm e xx bm v` 成右手系. `bm v'` 等于将 `bm v^(_|_)` 旋转 `theta` 角后, 再加上 `bm v^||`: `bm v' = bm v^|| + bm v^(_|_) cos theta + bm e xx bm v sin theta`.
四元数表示的证明.
记 `alpha = theta//2`, 有
`q bm v q^-1`
`= (cos alpha + bm e sin alpha) bm v (cos alpha - bm e sin alpha)`
`= bm v cos^2 alpha - bm (e v e) sin^2 alpha`
`+ (bm e bm v - bm v bm e) sin alpha cos alpha`
`= bm v cos^2 alpha - bm (e v e) sin^2 alpha`
`+ 2 bm e xx bm v sin alpha cos alpha`.
`bm (e v e)` 可以分解为以下两式之和:
`bm (e v)^|| bm e`
`= -(bm v * bm e) bm e`
`= - bm v^||`,
`bm (e v^(_|_) e)`
`= (bm e xx bm v^(_|_)) xx bm e`
`= bm v^(_|_)`,
从而
`q bm v q^-1`
`= (bm v^|| + bm v^(_|_))cos^2 alpha + (bm v^|| - bm v^(_|_))sin^2 alpha`
`+ bm e xx bm v sin theta`
`= bm v'`.
已知旋转前后向量, 求四元数 设 `bm v = hat q bm u hat q^-1`, `bm u, bm v in RR bm i + RR bm j + RR bm k`, 如果规定 `bm u, bm v` 不共线, 则 `q = |bm u| |bm v| + bm u * bm v + bm u xx bm v`, `quad hat q = q//|q|`.
q.setFromUnitVectors(u, v).
空间中一点 `[0, 0, 1]^(sf T)` 左乘变换 `R_x(90^@) R_y(90^@)` 的结果是 `[1, 0, 0]^(sf T)`. 可以验证, 这相当于先绕 x 轴旋转 90 度, 然后绕新 y 轴旋转 90 度; 同时, 也相当于先绕 y 转旋转 90 度, 然后绕原 x 轴旋转 90 度.
在 three.js 中, 默认的 Euler 角类型是 extrinstic XYZ, 相当于 intrinstic ZYX. 用小车的语言, 这是先上下坡 (点头 pitch), 再在坡上转向 (摇头 heading), 最后翻滚 (歪头 roll).
[田宗若《张量分析》]
可以验证在上述定义的加法下, 向量集合是交换群. 如果引入实数与向量之间的数乘, 并满足下面的公理, 则 `V` 成为 `RR` 上的线性空间:
满足上面所有公理的点和向量 `(P, V)` 称为一个仿射空间, 它的维数就定义为线性空间 `V` 的维数.